![]() > Spéciaux > Prix Visible
> Spéciaux > Prix Visible
Prix Visible


















Balance électronique MAULtronic S jusqu'à 2 000g : précision: 0.5 g de 0-100 g ; 1 g de 100-2000 g















Système de pendule inversé sur rail, Nécessite logiciel MATLAB non fourni
Carte interface PCI 1x168PIN 175x100 mm et câbles pour MATLAB(tm) fournis. Documentation en anglais

Système de lévitation magnétique - Nécessite logiciel MATLAB non fourni
Carte interface PCI 1x168PIN 175x100 mm et câbles pour MATLAB(tm) fournis. Doc. en anglais
Twin Rotor MIMO - Système non linéaire à double rotor, Nécessite logiciel MATLAB non fourni
Carte interface PCI 1x168PIN 175x100 mm et câbles pour MATLAB(tm) fournis. Doc. en anglais

Système de lévitation magnétique - LabVIEW(tm)
Carte d'interface et câbles pour LabVIEW(tm) fournis. Inclus la documentation en anglais.

Système d'étude de la commande d'un moteur CC avec différentes capteurs, codeurs
Nécessite le logiciel ESPIAL (93-420), comprend les références 01-100, 33-100, 33-125

ESPIAL Cours: Bases de la régulation et de l'instrumentation sur CD
Alternative: en téléchargement gratuitement sur le site LEYBOLD

Partie opérative pour régulation de vitesse/position pour réf. 33-033
Sous-ensemble du simulateur ESPIAL MSR



MATLAB modèles pour pendule inversé sur CD
Alternative: en téléchargement gratuitement sur le site LEYBOLD

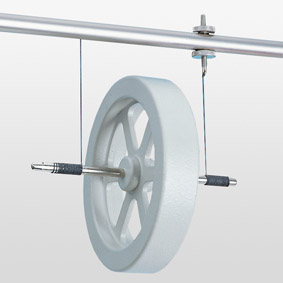
Roue de Maxwell, étude et analyse de la transformation de l'énergie potentielle en énergie cinétique











Grand appareil balistique pour les expériences quantitatives sur les lois de la balistique
par ex. relevé de trajectoires paraboliques, étude influence des angles ou des distances de lancé

Chariot de mesure. Utilisé sur le rail métallique de précision (46081)
pour l'étude de la cinématique et de la dynamique