Les expériences sont réalisées avec des plaques expérimentaux dans un cadre profilé.
Objectifs pédagogiques
- Configuration expérimentale et câblage en fonction du schéma de câblage
- Manipulation des systèmes régulés en boucle fermée
- Optimisation des systèmes d'asservissement
- Utilisation d'interfaces de mesure informatisées
Fonction
Les servos sont des actionneurs de transmission de position linéaire ou angulaire.
Arrivé à ce point l'actuelle position sera mesurée et comparée avec la valeur de consigne pour s'y approcher.
Par conséquent les Servos trouvent leurs applications dans la régulation technique classique.
Les servos possèdent une (petite) machine d'entraînement et un potentiomètre suiveur.
L'évaluation des servos se fait par l'analyse de la réponse à un échelon.
Cependant, les optimisations selon les méthodes connues (ZN ou CHR) ne sont pas possibles car ces méthodes sont allouées uniquement pour des boucles de régulations PTn.
Un servo DC posède essentiellement une boucle de régulation à action intégral.
Typiquement, les servos sont donc exploités avec des régulateurs P.
L'équipement inclut des expériences pour étudiants qui peuvent être réalisées dans un laboratoire avec une très basse tenison de sécurité.Les instructions des expériences sont contenues d'un un manuel en version imprimée ou électronique.
Le groupe cible est constitué d'apprentis du domaine commercial et d'étudiants en génie énergétique et mécatronique. Le cours propose des expériences de niveau moyen pour les écoles professionnelle.
Thèmes
- Simulation de limite de stabilité
- Mise en service du servo DC
- Enregistrement manuel de la caractéristique d'asservissement
- Enregistrement automatique de la caractéristique d'asservissement
- Réponses à un échelon d'un système avec une régulation intégral
- Réponses à un échelon du servo DC
- Réponse à un échelon avec fonction adaptative
- Détermination de la fréquence de coupure de 3 dB du servo
- Servocommande DC
- Comportement du guide avec disque de masse attaché (moment d'inertie élevé)
- Régulation avec limitation de l'augmentation de la variable de référence
- Simulation par ordinateur du servomoteur CC
Figure similaire
Équipement comprenant :
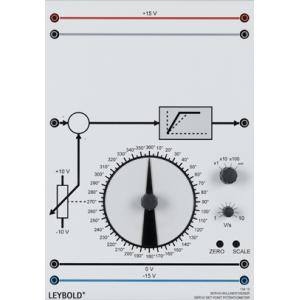
1 734 10 Générateur de consigne des systèmes asservis
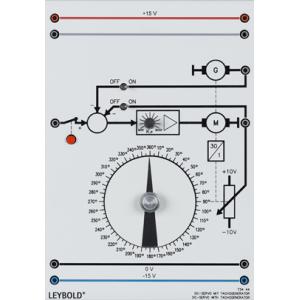
1 734 44 Servo moteur CC avec génératrice tachymètrique
1 734 36 Disque de masse avec crochet
1 524 016S2 Profi-CASSY Starter 2
1 726 09 Cadre profilé T130, deux étages
1 726 86 Alimentation stabilisée ± 15 V/3 A
1 500 611 Câble de connexion de sécurité, 25 cm, rouge
1 500 59 Cavalier protégé, noirs, jeu de 10
1 500 641 Câble de connexion de sécurité, 100 cm, rouge
1 500 642 Câble de connexion de sécurité, bleu
2 500 644 Câble de connexion de sécurité, 100 cm, noir
1 775 325FR LIT-print: Servo DC
1 734 501 WINFACT LD Starter (un operateur)
1 734 502 WINFACT LD Starter (lic-scolaire)
1 726 10 Cadre profilé T150, deux étages
1 Egalement nécessaire (pas compris dans le montant total): 1 PC avec Windows 7/8.1/10 (x86 ou x64)
Les expériences sont réalisées et évaluées avec CASSY Lab 2 et WinFACT.
Objectifs pédagogiques
- Configuration expérimentale et câblage en fonction du schéma de câblage
- Manipulation des systèmes régulés en boucle fermée
- Optimisation des systèmes d'asservissement
- Utilisation d'interfaces de mesure informatisées
Fonction
Les servos sont des actionneurs de transmission de position linéaire ou angulaire.
Arrivé à ce point l'actuelle position sera mesurée et comparée avec la valeur de consigne pour s'y approcher.
Par conséquent les Servos trouvent leurs applications dans la régulation technique classique.
Les servos possèdent une (petite) machine d'entraînement et un potentiomètre suiveur.
L'évaluation des servos se fait par l'analyse de la réponse à un échelon.
Cependant, les optimisations selon les méthodes connues (ZN ou CHR) ne sont pas possibles car ces méthodes sont allouées uniquement pour des boucles de régulations PTn.
Un servo DC posède essentiellement une boucle de régulation à action intégral.
Typiquement, les servos sont donc exploités avec des régulateurs P.
L'équipement inclut des expériences pour étudiants qui peuvent être réalisées dans un laboratoire avec une très basse tenison de sécurité.Les instructions des expériences sont contenues d'un un manuel en version imprimée ou électronique.
Le groupe cible est constitué d'apprentis du domaine commercial et d'étudiants en génie énergétique et mécatronique. Le cours propose des expériences de niveau moyen pour les écoles professionnelle.
Thèmes
- Simulation de limite de stabilité
- Mise en service du servo DC
- Enregistrement manuel de la caractéristique d'asservissement
- Enregistrement automatique de la caractéristique d'asservissement
- Réponses à un échelon d'un système avec une régulation intégral
- Réponses à un échelon du servo DC
- Réponse à un échelon avec fonction adaptative
- Détermination de la fréquence de coupure de 3 dB du servo
- Servocommande DC
- Comportement du guide avec disque de masse attaché (moment d'inertie élevé)
- Régulation avec limitation de l'augmentation de la variable de référence
- Simulation par ordinateur du servomoteur CC
Figure similaire
Équipement comprenant :
1 734 10 Générateur de consigne des systèmes asservis
1 734 44 Servo moteur CC avec génératrice tachymètrique
1 734 36 Disque de masse avec crochet
1 524 016S2 Profi-CASSY Starter 2
1 726 09 Cadre profilé T130, deux étages
1 726 86 Alimentation stabilisée ± 15 V/3 A
1 500 611 Câble de connexion de sécurité, 25 cm, rouge
1 500 59 Cavalier protégé, noirs, jeu de 10
1 500 641 Câble de connexion de sécurité, 100 cm, rouge
1 500 642 Câble de connexion de sécurité, bleu
2 500 644 Câble de connexion de sécurité, 100 cm, noir
1 775 325FR LIT-print: Servo DC
1 734 501 WINFACT LD Starter (un operateur)
1 734 502 WINFACT LD Starter (lic-scolaire)
1 726 10 Cadre profilé T150, deux étages
1 Egalement nécessaire (pas compris dans le montant total): 1 PC avec Windows 7/8.1/10 (x86 ou x64)
Les expériences sont réalisées et évaluées avec CASSY Lab 2 et WinFACT.
Formations > CPGE > Regulation - Asservissement
Techniques > Régulation > Bases de la régulation > Régulation de position